電機(jī)驅(qū)動(dòng)控制實(shí)驗(yàn)室包括一套電機(jī)設(shè)計(jì)���、控制及綜合測(cè)試研究平臺(tái),該平臺(tái)依托于遼寧省高等學(xué)校重大科技平臺(tái)“汽車及零部件關(guān)鍵技術(shù)工程研究中心”�、遼寧省重點(diǎn)實(shí)驗(yàn)室“智能控制理論及應(yīng)用”和“遼寧省新能源汽車智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室”,是一套功能齊全�����、性能優(yōu)異��、并與電機(jī)真實(shí)運(yùn)行工況相符的仿真及試驗(yàn)研究平臺(tái)�����,實(shí)現(xiàn)電機(jī)的設(shè)計(jì)、控制及硬件在環(huán)仿真研究和綜合測(cè)試研究�����。實(shí)現(xiàn)的核心功能如下:
1.從電機(jī)控制策略驗(yàn)證到電機(jī)控制器性能全面測(cè)試
2.從電機(jī)驅(qū)動(dòng)模塊仿真到電機(jī)控制器在環(huán)測(cè)試
3.從電機(jī)模型設(shè)計(jì)到真實(shí)電機(jī)測(cè)試
4.從電機(jī)智能控制技術(shù)的理論研究到產(chǎn)品設(shè)計(jì)研發(fā)的跨越

電機(jī)驅(qū)動(dòng)實(shí)驗(yàn)室
一��、平臺(tái)組成

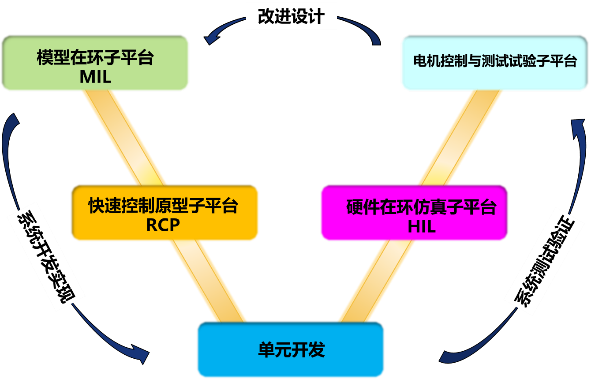
二����、平臺(tái)實(shí)現(xiàn)的研發(fā)理念
三�、模型在環(huán)(Model in the Loop)仿真子平臺(tái)介紹
模型在環(huán)(Model in the Loop,MIL)是采用模型驅(qū)動(dòng)技術(shù)進(jìn)行系統(tǒng)開發(fā)過(guò)程中在建模及開發(fā)初期階段使用的仿真技術(shù)����。
模型在環(huán)平臺(tái)是有真實(shí)信號(hào)交互的實(shí)時(shí)仿真平臺(tái),將純軟件模型拆分為被控對(duì)象模型與控制算法模型兩部分���,二者之間通過(guò)硬件交互信號(hào)�,將IO通道��、實(shí)時(shí)性等考慮進(jìn)來(lái)���,使得在原型階段時(shí)也能完成原先需要大量實(shí)物才能進(jìn)行的測(cè)試工作����,可以有效縮短研發(fā)周期。
四�����、快速控制原型(Rapid Control Prototyping)子平臺(tái)介紹
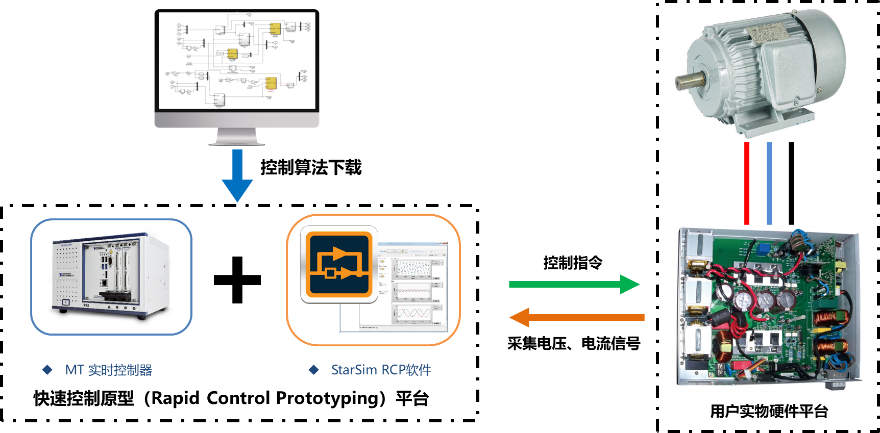
快速控制原型(Rapid Control Prototyping�����,RCP)是用基于實(shí)時(shí)操作系統(tǒng)的高性能控制器(原型控制器)替換控制系統(tǒng)中實(shí)物控制器的在原型硬件上校準(zhǔn)控制算法的一種半實(shí)物仿真技術(shù)����。
快速控制原型平臺(tái)提供了一種方法來(lái)導(dǎo)入數(shù)學(xué)模型,并在與實(shí)際I/O連接的原型控制器上運(yùn)行這些數(shù)學(xué)模型�����??焖倏刂圃驮O(shè)計(jì)是一種快速方便驗(yàn)證控制算法的方法,用戶可以實(shí)時(shí)地在硬件上測(cè)試算法��,為檢測(cè)程序設(shè)計(jì)節(jié)省大量時(shí)間以及專注創(chuàng)新提高效率�。
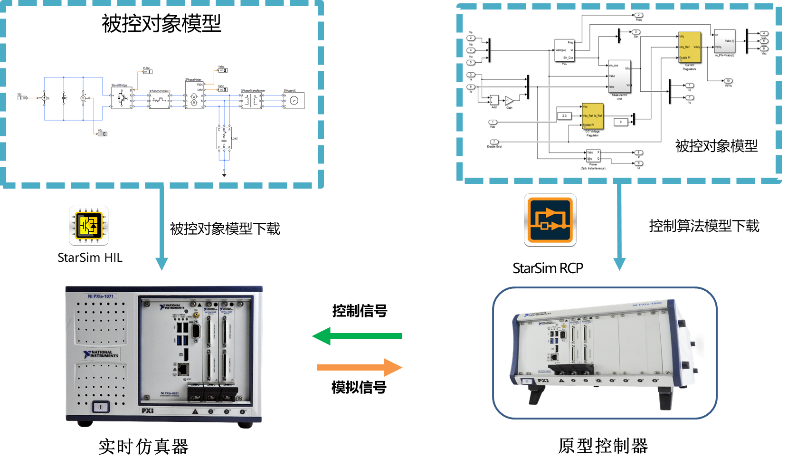
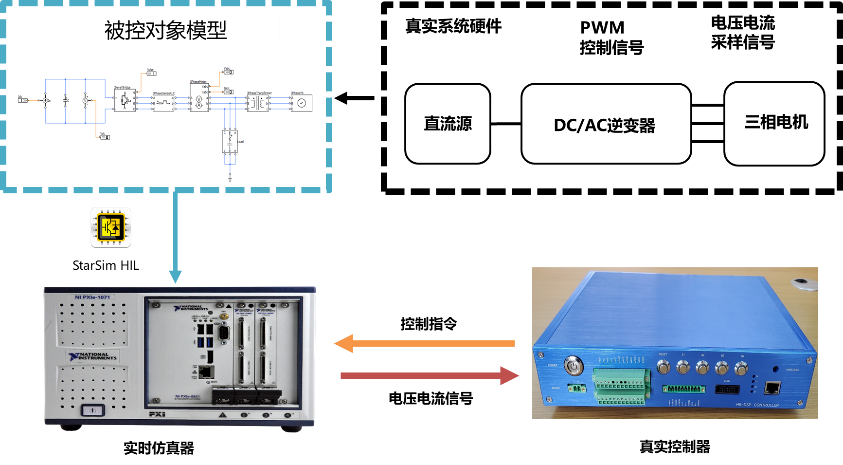
五��、硬件在環(huán)(Hardware-in-the-loop)仿真子平臺(tái)介紹
硬件在環(huán)(Hardware-in-the-loop���,HIL)仿真子平臺(tái)由HIL實(shí)時(shí)仿真器與實(shí)物控制器連接構(gòu)成閉環(huán)實(shí)時(shí)仿真平臺(tái),是在復(fù)雜控制系統(tǒng)開發(fā)與測(cè)試中常用到的技術(shù)����。
HIL實(shí)時(shí)仿真器可以通過(guò)模型編輯器快速修改被控對(duì)象模型的拓?fù)浜蛥?shù),實(shí)現(xiàn)快速?gòu)?fù)現(xiàn)各種故障工況��,有利于研究人員進(jìn)行故障測(cè)試和長(zhǎng)時(shí)間系統(tǒng)測(cè)試�,同時(shí)也隔離了測(cè)試過(guò)程中高電壓與短路測(cè)試可能帶來(lái)的風(fēng)險(xiǎn),為控制系統(tǒng)的研發(fā)與測(cè)試大大提高了效率與安全性����。
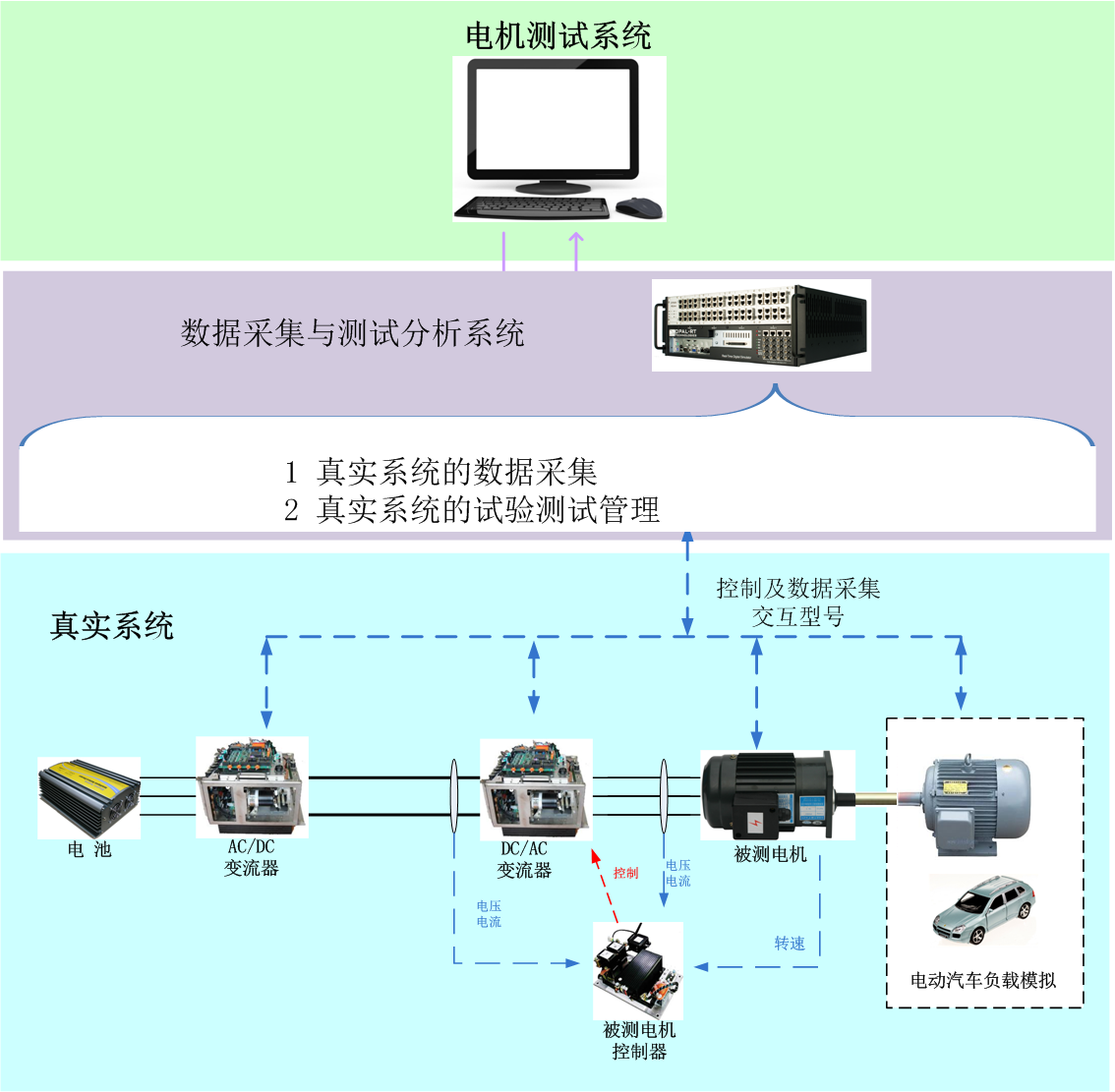
六��、電機(jī)控制與測(cè)試試驗(yàn)子平臺(tái)介紹
電機(jī)控制與測(cè)試試驗(yàn)子平臺(tái)由臺(tái)架主控系統(tǒng)�、被測(cè)電機(jī)及其驅(qū)動(dòng)控制系統(tǒng)、測(cè)功電機(jī)及其驅(qū)動(dòng)控制系統(tǒng)��、高壓直流電源��、功率分析儀測(cè)量柜組成�����,用于控制算法、驅(qū)動(dòng)控制器�、電機(jī)等試驗(yàn)研究。本試驗(yàn)子平臺(tái)可以在手動(dòng)模式及自動(dòng)模式下運(yùn)行�,能夠按需要設(shè)定運(yùn)行工況。