“新能源汽車智能控制技術”實驗室于2012年獲批為遼寧省重點實驗室�,包括“汽車智能控制實驗室”和“電機驅(qū)動控制實驗室”�,依托于遼寧省高等學校重大科技平臺“汽車及零部件關鍵技術工程研究中心”,目的是通過培養(yǎng)和引進拔尖人才����,解決汽車及零部件關鍵共性技術,系統(tǒng)推進遼寧省汽車及零部件產(chǎn)業(yè)集群的校企協(xié)同創(chuàng)新����,技術轉(zhuǎn)移與科技成果轉(zhuǎn)化。
一�����、“汽車智能控制實驗室”
該實驗室位于五號教學樓119���,試驗設備主要包括一套液壓加載伺服系統(tǒng)���,一套硬件在環(huán)仿真系統(tǒng),一套汽車動力學仿真系統(tǒng)�,對于汽車先進技術的研究、智能控制算法的開發(fā)以及學科交叉技術的發(fā)展具有重要的理論與實際意義���,可以為教師和學生開展與汽車智能控制相關方面的工程研究���、學術研究����、縱向課題申報和本科生�����、研究生教學提供一個良好平臺�。


二、“電機驅(qū)動控制實驗室”
該實驗室位于五號教學樓109��,包括一套電機設計���、控制及綜合測試研究平臺�����,是一套功能齊全、性能優(yōu)異���、并與汽車電機真實運行工況相符的仿真及試驗研究平臺����,實現(xiàn)電機的設計、控制及硬件在環(huán)仿真研究和綜合測試研究���。實現(xiàn)的核心功能如下:
1.從電機控制策略驗證到電機控制器性能全面測試
2.從電機驅(qū)動模塊仿真到電機控制器在環(huán)測試
3.從電機模型設計到真實電機測試
4.從電機智能控制技術的理論研究到產(chǎn)品設計研發(fā)的跨越

電機驅(qū)動實驗室
(一)平臺組成

(二)平臺實現(xiàn)的研發(fā)理念
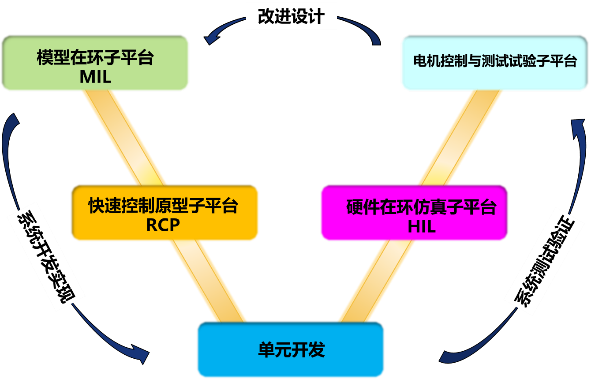
(三)模型在環(huán)(Model in the Loop)仿真子平臺介紹
模型在環(huán)(Model in the Loop�����,MIL)是采用模型驅(qū)動技術進行系統(tǒng)開發(fā)過程中在建模及開發(fā)初期階段使用的仿真技術��。
模型在環(huán)平臺是有真實信號交互的實時仿真平臺���,將純軟件模型拆分為被控對象模型與控制算法模型兩部分,二者之間通過硬件交互信號���,將IO通道����、實時性等考慮進來��,使得在原型階段時也能完成原先需要大量實物才能進行的測試工作����,可以有效縮短研發(fā)周期。
(四)快速控制原型(Rapid Control Prototyping)子平臺介紹
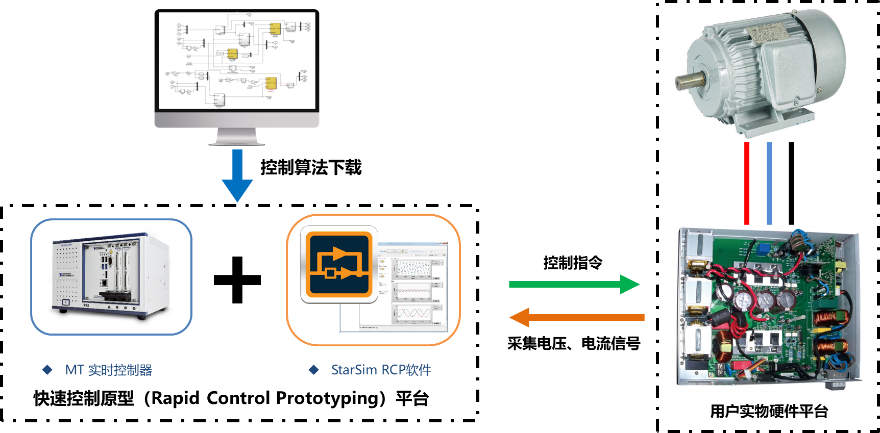
快速控制原型(Rapid Control Prototyping�����,RCP)是用基于實時操作系統(tǒng)的高性能控制器(原型控制器)替換控制系統(tǒng)中實物控制器的在原型硬件上校準控制算法的一種半實物仿真技術。
快速控制原型平臺提供了一種方法來導入數(shù)學模型��,并在與實際I/O連接的原型控制器上運行這些數(shù)學模型��?��?焖倏刂圃驮O計是一種快速方便驗證控制算法的方法�,用戶可以實時地在硬件上測試算法���,為檢測程序設計節(jié)省大量時間以及專注創(chuàng)新提高效率�。
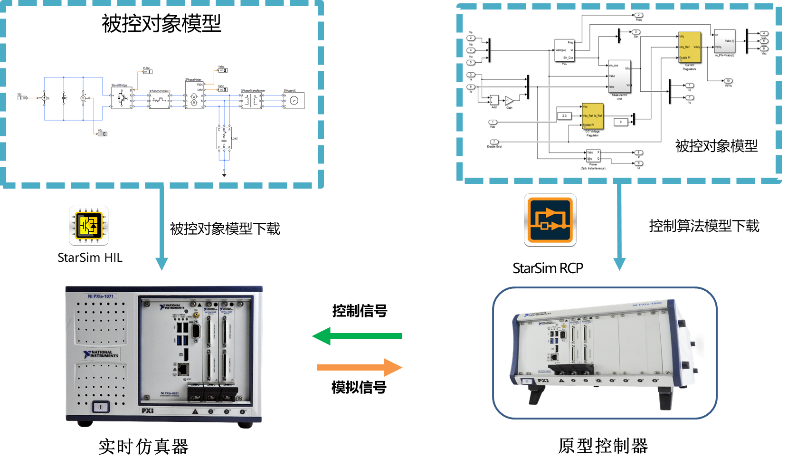
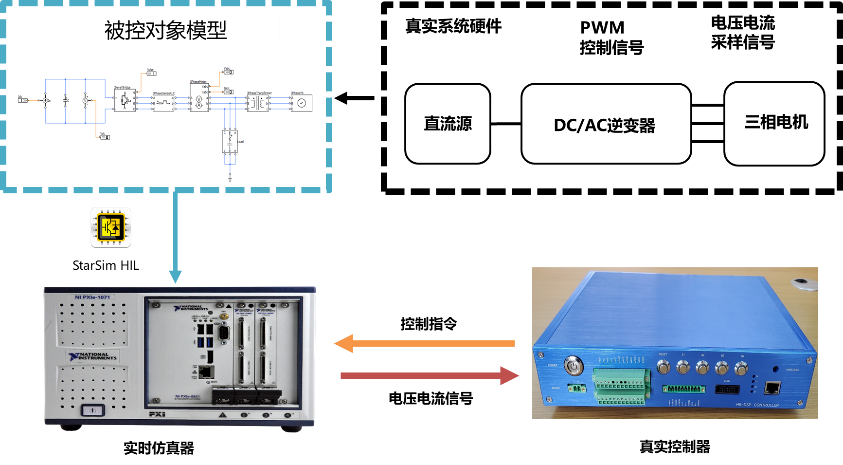
(五)硬件在環(huán)(Hardware-in-the-loop)仿真子平臺介紹
硬件在環(huán)(Hardware-in-the-loop��,HIL)仿真子平臺由HIL實時仿真器與實物控制器連接構成閉環(huán)實時仿真平臺�����,是在復雜控制系統(tǒng)開發(fā)與測試中常用到的技術�。
HIL實時仿真器可以通過模型編輯器快速修改被控對象模型的拓撲和參數(shù),實現(xiàn)快速復現(xiàn)各種故障工況�����,有利于研究人員進行故障測試和長時間系統(tǒng)測試���,同時也隔離了測試過程中高電壓與短路測試可能帶來的風險��,為控制系統(tǒng)的研發(fā)與測試大大提高了效率與安全性�����。
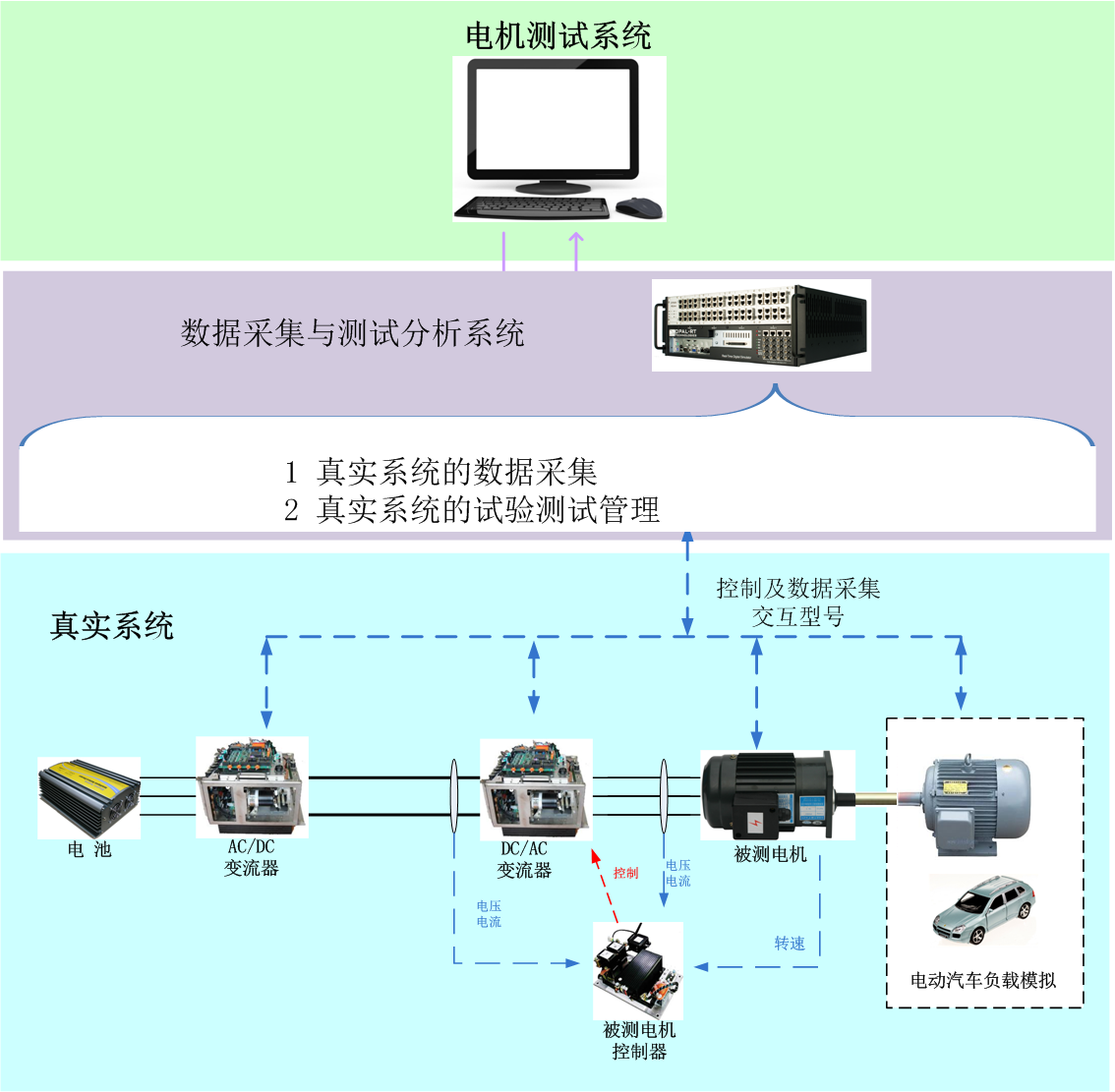
(六)電機控制與測試試驗子平臺介紹
電機控制與測試試驗子平臺由臺架主控系統(tǒng)��、被測電機及其驅(qū)動控制系統(tǒng)����、測功電機及其驅(qū)動控制系統(tǒng)���、高壓直流電源��、功率分析儀測量柜組成��,用于控制算法���、驅(qū)動控制器、電機等試驗研究。本試驗子平臺可以在手動模式及自動模式下運行�,能夠按需要設定運行工況。